状況に基づく操縦
この記事は Godot 3から Godot 4 へ内容の書き換え中です。 Godot4では存在しない変数、関数が含まれている場合があります。もしその場合はリポジトリのIssuesまでご報告ください。
課題
経路を追従し、障害物を避け、世界を移動する方法について他の判断もできるAI制御オブジェクトがほしい。
解決策
「ステアリング挙動」とは、この問題を解決するために使用可能な様々なアルゴリズムの総称です。どの手法を採用するかは、ゲームの特性、オブジェクトが存在する世界の種類、そして求める「知性」のレベルによって異なります。
この例では、「状況に基づく振舞い(Context Behavior)」と呼ばれる手法を採用します。これは、オブジェクトが移動方法を選択するために十分なワールドの情報を得ることを目的とするものです。本テーマについてさらに詳しく知りたい方は、以下の関連リンクを参照してください。
このデモでは、汎用的な「エージェント」オブジェクトを使用します。実際のゲームであれば、これはレースコースを走る車、ダンジョンを巡回するモンスター、あるいは他の種類のゲーム内エンティティなどに相当するでしょう。エージェントは CharacterBody2D を使用しますが、覚えておいていただきたいのは、このテクニックはどんな種類のオブジェクトにも適用可能だということです。アルゴリズム自体は対象が移動する方向を選択する方法に関するものであり、実際の移動方法は完全に別個の問題です。
アルゴリズムについて
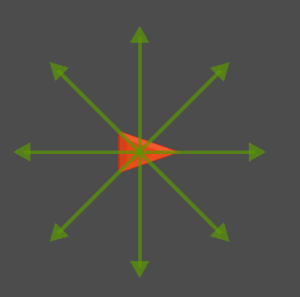
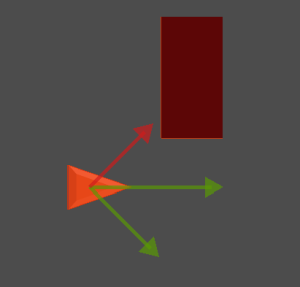
まず、エージェントがすべての方向に放射線状に広がる複数のレイを持っていると仮定します(使用する本数については後で説明します。とりあえずここでは8本を使用してください)
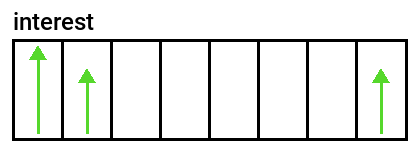
エージェントのスクリプト内では、エージェントが移動したい方向を追跡するための配列interestを定義します。
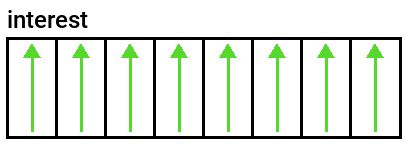
もちろん、全て同じ方向なら動けません。あらゆる方向に均等に移動したいはずです!そこで、特定の方向への優先性があると仮定します。主に前進したい場合を考えます。
この場合、interest配列は以下のようになります。
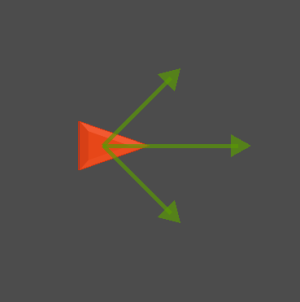
最も強い願望は前進することですが、左前方や右前方も許容範囲内です。しかし、障害物が現れた場合は?
次に、好ましくない方向を示す第2の配列dangerを導入します。
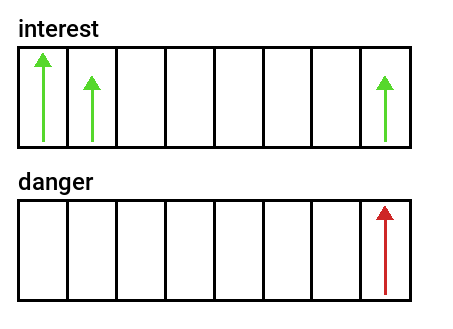
これら2つの配列を組み合わせることで、danger(危険度)に含まれるinterest(興味度)方向を除去することが可能です。残ったinterest方向を合計すると、障害物から離れる新しい方向ベクトルが得られます。
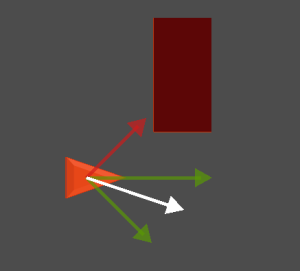
要約すると:
- オブジェクトの
interst(関心度)方向を特定する danger(危険度)を含む方向をすべて特定する- 危険な
interest(関心度)方向がある場合はすべて除外する - 残った
interest(関心度)方向を合算して新たな進行方向を決定する
興味を見つける方法
これはエージェントの目標内容によって異なります。もしその目的が『プレイヤーを追跡すること』であれば、interestの値はプレイヤー方向へ高くなるべきです。複数のターゲットを設定することも可能で、より近い目標ほど高い興味を持ちますが、障害物によって無効化された場合、スコアが低い他の目標が優先されます。
このデモでは、何らかのレースゲームを作っていると仮定します。AI制御の車はサーキットを周回が必要です。そのinterest配列はコースに沿って前方を指すように設定すべきで、そうしないと逆走を開始してしまいます。
これを実現する方法は複数ありますが、エージェントが実装の詳細を知る必要がないよう、トラックがどの方向に進むべきかを位置情報に基づいて指示するシステムを構築します。いつでも「どの方向が正しいか」と聞けば、トラックがその指示を伝えてくれます。
コード例
以下にエージェントのコードを示します。まずはエクスポートした値から始めてください。移動パラメーターと、後で容易に調整できるようにしたいその他の値です。例えば look_ahead は、danger レイが障害物を検出する範囲を指定します。
※注:num_rays(レイの数)は調整可能な設定となっています。これにより、用途に最適な数値を見つけることができます。以下では、レイの数が多い場合のメリット・デメリットについて詳しく解説します。
extends CharacterBody2D
@export var max_speed = 350
@export var steer_force = 0.1
@export var look_ahead = 100
@export var num_rays = 8
# context array
var ray_directions = []
var interest = []
var danger = []
var chosen_dir = Vector2.ZERO
var velocity = Vector2.ZERO
var acceleration = Vector2.ZERO
次の _ready() 関数では、配列を適切にサイズ調整し、ray_directions 配列に実際のレイベクトルを格納します。これらは num_rays に基づいて円周上に均等に配置されます。最初は回転していない状態なので、Vector2.RIGHT が前方方向となります。
func _ready():
interest.resize(num_rays)
danger.resize(num_rays)
ray_directions.resize(num_rays)
for i in num_rays:
var angle = i * 2 * PI / num_rays
ray_directions[i] = Vector2.RIGHT.rotated(angle)
_physics_process() 関数では、コンテキスト配列を埋め、移動処理を実行します。注目すべき点として、アルゴリズムの各ステップを別々の関数に分割しています。目的の方向を特定したら、可能な限りその方向へ向きを変え(steer_force に基づく)、その後移動を行います。
func _physics_process(delta):
set_interest()
set_danger()
choose_direction()
var desired_velocity = chosen_dir.rotated(rotation) * max_speed
velocity = velocity.linear_interpolate(desired_velocity, steer_force)
rotation = velocity.angle()
move_and_collide(velocity * delta)
それでは、アルゴリズムを構成する3つの主要な機能について説明します。まず、interest配列の設定についてです。前述の通り、世界(この場合はowner)に対して、どちらの方向に移動すべきかを指示するよう求めます。
各レイの方向に対して、与えられた経路方向との 内積 を計算します。二つの平行なベクトルの内積は 1、直交するベクトルの場合は 0 となることを思い出してください。負の値は無視します - 値が 0 の場合は、その方向へ進む必要がないことを意味します。
例えば、使用するレイが32本の場合、interestは以下のようになります。
安全対策として、案内してくれる所有者がいない場合は、自動的に前進を試みる設定になっています。
func set_interest():
# Set interest in each slot based on world direction
if owner and owner.has_method("get_path_direction"):
var path_direction = owner.get_path_direction(position)
for i in num_rays:
var d = ray_directions[i].rotated(rotation).dot(path_direction)
interest[i] = max(0, d)
# If no world path, use default interest
else:
set_default_interest()
func set_default_interest():
# Default to moving forward
for i in num_rays:
var d = ray_directions[i].rotated(rotation).dot(transform.x)
interest[i] = max(0, d)
次に、danger配列を埋めます。Physics2DDirectSpaceStateを使用して、各方向にレイをキャストします。衝突があった場合、その位置に1を追加してください。
func set_danger():
# Cast rays to find danger directions
var space_state = get_world_2d().direct_space_state
for i in num_rays:
var result = space_state.intersect_ray(position,
position + ray_directions[i].rotated(rotation) * look_ahead,
[self])
danger[i] = 1.0 if result else 0.0
最後に、コンテキスト配列を使用して方向を選択できます。danger 配列をループ処理し、危険が存在する場所のすべての interest 値をゼロに設定します。その後、残りの興味ベクトルをすべて加算して正規化します。
func choose_direction():
# Eliminate interest in slots with danger
for i in num_rays:
if danger[i] > 0.0:
interest[i] = 0.0
# Choose direction based on remaining interest
chosen_dir = Vector2.ZERO
for i in num_rays:
chosen_dir += ray_directions[i] * interest[i]
chosen_dir = chosen_dir.normalized()
実際の使用例
実際に試してみます!ここでは、Path2Dと衝突判定用のポリゴンを使ってトラックを作成してみました。
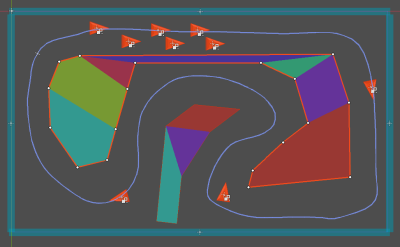
このシーンのスクリプトには、get_path_direction() 関数が含まれています。位置を指定すると、この関数はパス上で最も近い点を検出し、その位置に PathFollow2D を配置することで進行方向を取得します。
func get_path_direction(pos):
var offset = path.curve.get_closest_offset(pos)
path_follow.offset = offset
return path_follow.transform.x
エージェントの移動速度をランダム化してバリエーションを加えました。速いエージェントが低速のエージェントをうまく避けながら進む様子に注目してください。

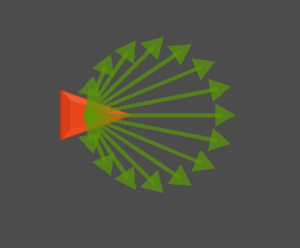
まとめ
この方法は非常に柔軟性が高く拡張性に優れており、以下のように複雑かつ多様な動作を生成できます。
以下に、適応策/改善点に関する追加提案を挙げます。
- 危険度レベル
danger 配列を初期化する際には、単に 0 や 1 を使うのではなく、オブジェクトまでの距離に基づいて「危険スコア」を計算してください。そして、その値を直接削除するのではなく、interest から減算します。遠方にあるオブジェクトは影響が小さく、近くにあるものほど影響力が強くなります。
- 回避策
危険な要素が関心を打ち消すのではなく、逆方向への関心を高めることも考えられます。