アーケードスタイルの飛行機
課題
3D空間で飛行機のコントローラーを作りたいが、完全なフライトシミュレーター機能は不要です。
解決策
このレシピでは、単純な航空機コントローラーを作成します。ここで言う「単純な」とは、基本機能だけに絞り込むことを意味します。目指しているのは、飛行機の操縦感覚――特別な訓練なしですぐに飛び立て、最小限の操作体系で簡単に飛行を楽しめるような体験です。
このレシピは厳密な飛行シミュレーターではありません。航空力学を再現しているわけではないので、本物の飛行機のように飛ぶわけではありません。ここでは正確性よりもシンプルさと「楽しさ」を追求しています。
ノード設定
このシーンでは CharacterBody3D を使用します。実際の飛行力学(揚力、抗力など)はシミュレートしないため、この場合 RigidBody3D は必要ありません。
以下にモデルのセットアップをご説明します。
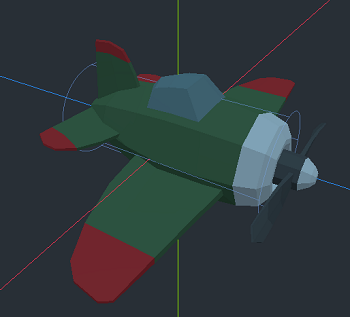
衝突判定用に円筒を使用し、機体のサイズに合わせて調整しています。これにより、デモで必要となる地面との接触検出が可能になります。
スクリプトを実行する前に、航空機のプロパティを確認してください。
extends CharacterBody3D
# Can't fly below this speed
var min_flight_speed = 12
# Maximum airspeed
var max_flight_speed = 40
# Turn rate
var turn_speed = 0.75
# Climb/dive rate
var pitch_speed = 0.5
# Wings "autolevel" speed
var level_speed = 3.0
# Throttle change speed
var throttle_delta = 50
# Acceleration/deceleration
var acceleration = 6.0
# Current speed
var forward_speed = 0
# Throttle input speed
var target_speed = 0
# Lets us change behavior when grounded
var grounded = false
var turn_input = 0
var pitch_input = 0
操作方法
このデモではゲームコントローラーを使用していますが、お好みでキーボード入力を追加することもできます。
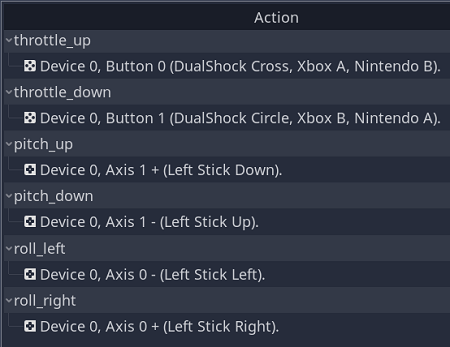
この機能は入力値を取得し、設定された値を反映します。なお、スロットルの増減操作は「actual_speed」ではなくtarget_speedを変更することに注意してください。これにより、現在の速度から目標速度までスムーズに加速・減速が可能になります。
func get_input(delta):
# Throttle input
if Input.is_action_pressed("throttle_up"):
target_speed = min(forward_speed + throttle_delta * delta, max_flight_speed)
if Input.is_action_pressed("throttle_down"):
var limit = 0 if grounded else min_flight_speed
target_speed = max(forward_speed - throttle_delta * delta, limit)
# Turn (roll/yaw) input
turn_input = Input.get_axis("roll_right", "roll_left")
# Pitch (climb/dive) input
pitch_input = Input.get_axis("pitch_down", "pitch_up")
移動
モーション処理は _physics_process() 内で行われ、まず速度を目標値にリニア補間した後、move_and_slide() 関数を使用して移動とスライディングを行います。
func _physics_process(delta):
get_input(delta)
# Accelerate/decelerate
forward_speed = lerpf(forward_speed, target_speed, acceleration * delta)
# Movement is always forward
velocity = -transform.basis.z * forward_speed
move_and_slide()
テスト方法:テストシーンにこの平面を追加してください( Cameraの設定を忘れずに)。"throttle_up"入力を押すと、平面が前方へ加速する様子が確認できるはずです。
補間カメラ機能 をこのデモで実装しています。
次に、飛行機のピッチ角度を変更する処理を追加してください。_physics_process() 内の get_input() 呼び出し直後に以下を追加してください。
transform.basis = transform.basis.rotated(transform.basis.x, pitch_input * pitch_speed * delta)
シーンを再度実行し、上下にパンしてみてください。
その後、ターン入力用に以下を追加してください。
transform.basis = transform.basis.rotated(Vector3.UP, turn_input * turn_speed * delta)
注意してほしいのですが、機体が旋回する際に、その動きがやや不自然に見えます。航空機はターン時に「バンク」(傾き)しますので、メッシュの回転角度を変更することでこれをアニメーション化します。
mesh.rotation.z = lerpf(mesh.rotation.z, -turn_input, level_speed * delta)
mesh は、平面シーン内の MeshInstance3D オブジェクトへの参照です(例では $cartoon_plane)。
ロール量はturn_input値に関連しているため、緩やかなターンでは傾きが少なくなります。直進すると自動的に機体が水平になります。
これで完了です!基本的な飛行制御が正常に動作するようになり、快適に操縦できるはずです。各種プロパティを調整して、それらが動きにどう影響するか試してみてください。
着陸/離陸時
上記の方法は空中移動には適していますが、地上での挙動を考えると不十分です。ここでは、非常に簡易的なアプローチ(「簡易」という表現は非常に基本的な方法を意味します - 実際のゲーム要件によっては、さらに拡張が必要になるでしょう)を用いて着陸シミュレーションを実装します。
まず、地上走行時と空中飛行時を明確に区別する必要があります。地上では速度を0に減速できますが、空中では最低限の対気速度を維持しなければなりません。また、地上走行中は旋回時にバンク(傾斜)しないようにしてください(翼が地面に接触して損傷する危険があるため)。
func _physics_process(delta):
get_input(delta)
transform.basis = transform.basis.rotated(transform.basis.x, pitch_input * pitch_speed * delta)
transform.basis = transform.basis.rotated(Vector3.UP, turn_input * turn_speed * delta)
# Bank when turning
if grounded:
mesh.rotation.z = 0
else:
mesh.rotation.z = lerpf(mesh.rotation.z, -turn_input, level_speed * delta)
# Accelerate/decelerate
forward_speed = lerpf(forward_speed, target_speed, acceleration * delta)
# Movement is always forward
velocity = -transform.basis.z * forward_speed
# Landing
if is_on_floor():
if not grounded:
rotation.x = 0
grounded = true
else:
grounded = false
move_and_slide()
その間、get_input()関数では、減速時と降下時にもgroundedを考慮に入れ、min_flight_speed以上の速度に達している場合にのみ離陸を許可するようにします。
func get_input(delta):
# Throttle input
if Input.is_action_pressed("throttle_up"):
target_speed = min(forward_speed + throttle_delta * delta, max_flight_speed)
if Input.is_action_pressed("throttle_down"):
var limit = 0 if grounded else min_flight_speed
target_speed = max(forward_speed - throttle_delta * delta, limit)
# Turn (roll/yaw) input
turn_input = Input.get_axis("roll_right", "roll_left")
if forward_speed <= 0.5:
turn_input = 0
# Pitch (climb/dive) input
pitch_input = 0
if not grounded:
pitch_input -= Input.get_action_strength("pitch_down")
if forward_speed >= min_flight_speed:
pitch_input += Input.get_action_strength("pitch_up")
全スクリプト
以下が完全なスクリプトです。
まとめ
このテクニックは、様々なアーケードスタイルの飛行ゲームに応用できます。例えば、マウス操作の場合、InputEventMouseMotion の relativeプロパティを使用してピッチとヨー入力を設定する方法が有効です。
プロジェクトのダウンロード
プロジェクトのサンプルコードはこちらからダウンロードできます。https://github.com/godotrecipes/3d_airplane_demo